SCR
SCRは表を中心的な表現手段として用いる.以下の表を用いる.
- モード遷移表(観測変数)
- イベント表(制御変数)
- 条件表(制御変数)
括弧内は,観測変数/制御変数のうち,どちらに対するものかを示している.観測変数は,環境中で関心のある情報であり,環境から機械(システム)に伝わる.制御変数は,システムが環境に働きかけるときの情報である.
モード遷移表
最初のモード遷移表について見てみる.以下が,境界書で用いている列車の例である.
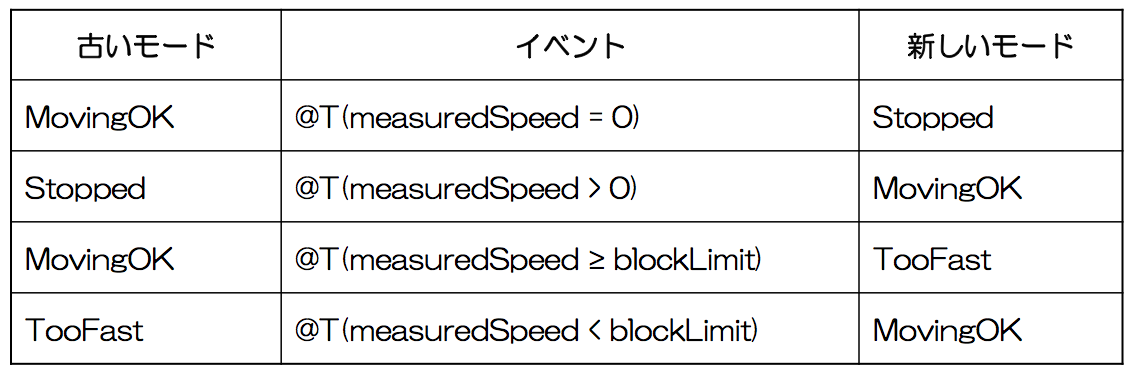
モード遷移表(MovementState モードクラス)
モード遷移は状態遷移と考えることができる.モードが状態に相当する.表題にあるモードクラスとは,観測変数に関する状態遷移を示している.ここでの観測変数とは,列車の速度であり,上記で measuredSpeedとして示される.
一行目を見てみる.自車速度がゼロであれば,車両は停止状態となる(新しいモードStopped).この表で違和感を感じるかもしれない.制御変数ではなく,観測変数に対する遷移表であることを思い起こす必要がある.
@Tの定義を見てみる.
@T(P1) WHEN P2
この意味は,「P2が真であるとき,P1はあるタイミングで,偽から真に変わる」である.即ち,P2 ∧ ¬P1∧P1’ である(ここでプライムは,Z言語で見たように,イベント受信後を指す).
@T(measuredSpeed = 0) イベントの場合だと,観測変数である列車速度について,次の説明となる.括弧内の否定(列車の速度が0ではない)ときは,MovingOKという古いモードである.括弧内が成立したとき(0になった瞬間),Stoppedにモードが変化する.
(nil)