要求のカテゴリ
非機能要求
非機能要求は,ソフトウェアが機能要求を満足するとき,或いは開発中に満足すべき制約を定義している (p.24)
例としては,以下が挙がっている.
- 文献検索を行う時および結果を表示する時のフォーマットは,コンピュータの経験がない学生にも利用可能であること
- 加速指令は,全ての列車に対して3秒ごとに送信すること
- 参加者のスケジュール制約は,他の出席予定者に開示されないこと
非機能要求というのは,機能要求に比べると注目されることが少ない.原書で挙げられている書籍のうち,古典的となっている教科書に,NON-FUNCTIONAL REQUIREMENTS IN SOFTWARE ENGINEERING [ref]Chung, L., Non-functional requirements in software engineering. Kluwer Academic: Boston, 1999.[/ref]がある.
本のタイトルは,ソフトウェア工学における非機能要求と,いわばカテゴリ名そのままである.よく整理された本であり,(非機能要求に対する関心が低いことも相まって)今後この本を超えるのはなかなか難しいと思う.以下,書名が長いので,NRF本ということにする.
NRF本の前半では,非機能要求のタイプについて議論している(5章).サーベイの結果として,161の非機能項目が挙がっている(数え間違いしていなければ).もちろん,この項目一つ一つについて議論する訳ではなく,フレームワークを用いて,正確性・セキュリティ・性能について詳細な議論を進めている.
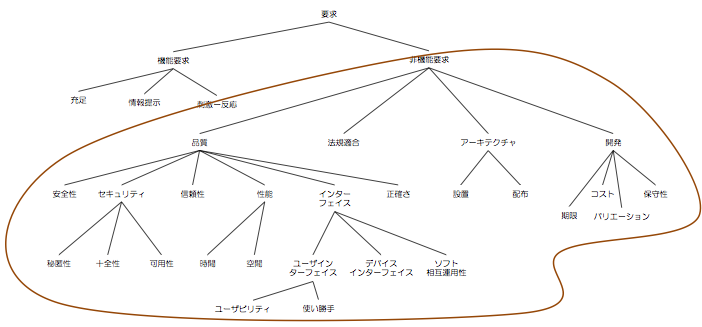
Lamsweerdeさんは,上記のNRF本を引用した上で,分類を示している.もちろん,網羅的ではないという但し書きつきでだ.下図は,機能・非機能の機能分類で,赤曲線枠内が,非機能に関連している.
さて,NRF本のおもしろさは,フレームワークにある.ちょうどKAOSゴールモデルとGSNを融合したような形式を持つ,汎用的な枠組みである[ref]そのため 161全部を示す必要がない.[/ref].ただ,ここで横道には入らないでおく.
(nil)
要求のカテゴリ
この項では,様々な要求のカテゴリを取りあげている.順番に見ることとしたい.
機能要求
機能要求は,将来ソフトウェアが環境中で持つべき機能的効果を定義している (P.23)
以前に「なに」次元で見たように,規範的記述である.以下に,原書にある例を示す.
- 文献検索エンジンは,キーワードに関係する図書館所有の本のリストを示すこと
- 列車制御ソフトウェアは,全てのシステムが管理する列車の加速を制御すること
- 会議スケジューラは,出席予定者のスケジュール制約を満足するようにスケジュールを決めること
原文では,全て”shall”を用いる記述になっている.ISO の規格日本語訳などでもおなじみの表現で,まさに要求事項を示している.さて,この次にまた不思議な文がある.
さて,そのような要求によって得られる効果は,”ソフトウェアが実行した「操作」によって生じる”と,している.
ここは,読むときに引っかかりがあった方が良い箇所と思う.おそらくわざと考えさせるような文にしている.要求でそういうソフトウェアを作れと書いてあるので,できたソフトウェアがその通りに動作するのは,当たり前ではないかと思う.まさに,その当たり前のことを書いている.ただ,ここでは,ソフトウェアの動作に名前をつけたいと考えている.その名前が,ソフトウェアの「操作」である.
この箇所に限らないが,パートIは,おそらくパートIIないしはパートIIIのあとに書かれている.少なくとも Lamseweerde さんの思考としては,パートIIと拡張・実験としてのパートIIIを繰り返している.その結果を,パートIへと抽象化したと考えている.
この本が出版されるまでの10年間ほどの間に,実に多くの論文がLamsweerdeさんによって書かれている.この本の物理的並びのように,抽象から具象へ進んでいるというより,具象から抽象が生まれている.従って,そのベースとなる具象が,抽象の議論に顔をだす.この「操作」概念も,同じであり,のちにKAOS法における重要な要素として紹介される.
さて,ここでは,幾つかのまとまった機能の集合をフィーチャー(feature)と呼ぶとして,ごく簡単にふれている.ここでのフィーチャは,プロダクトファミリーの議論にあるフィーチャとは違っている.もっとも,プロダクトファミリーについても,本書では軽い記述しかない.このパートは,要求の包括的な議論であり,記載が少ないことが,逆にとても興味深い.
(nil)
定義からいって,ソフトウェア要求は,システム要求である.しかし,逆は成立しない.あいまいさがないところでは,要求といえば,システム要求を指す (p.19)
システム要求 SysReq は,次のように記述できる.いま,Mが監視している変数の集合で,制御対象変数の集合をCとする(一般的なコントローループラントモデル).このとき,次が成立する
SysReq ⊆ M × C
ソフトウェア要求 SofReq は,次のように記述できる.同様に,入力変数の集合をIとし,出力変数の集合をOとする.
SofReq ⊆ I × O
この2つの式は,当たり前のようにも見えるし,本当かと思ったりもする.
どのような記述が適切かは,システムやソフトウェアをどうモデル化するかに依存している.ここでは,システムにしろソフトウェアにしろ,入力を変換して出力する機械とみなす.もちろん,対象は異なる.システムの場合,監視している変数(例えば,自動車の場合,現在速度や車軸回転数)から制御対象の変数(アクセル開度が決まる).M × Cというのは,直積を示す(要求と関する部分が,かなり疎なマトリクスになる).ソフトウェアの場合も同様である.ただ,監視や制御ではなく,入出力といういい方に変わる.
さて,次は,SysReqとSoftReqの関係である.
前回は,ドメインプロパティと前提について見た.ここで復習を兼ねて,ドメインプロパティ(Dom)と前提(Asm)の関連する記述を示す(p. 22)
| システム要求 |
SysReq |
TrainMoving → DoorsClosed |
| ソフトウェア要求 |
SoftReq |
MeasuredSpeed ≠ 0 → doorsState = ‘closed’ |
| ドメインプロパティ |
Dom |
TrainMoving ↔ trainSpeed ≠ 0 |
| 前提 |
Asm |
measuredSpeed ≠ 0 ↔ trainSpeed ≠ 0 |
| DoorsState = ‘closed’ ↔ DoorsClosed |
ドメインプロパティは,環境側(システムが埋め込まれる世界)であり[ref]上記で,trainSpeedは,変数のように見える.しかし,ここでは環境中の表現である.ソフトウェア的な変数は,measuredSpeedの方である[/ref],前提は環境とソフトウェアの共通領域なので,DOMとASMを利用して,システム要求 SysReq とソフトウェア要求 SofReq を結びつけることができる.
{SOFREQ, ASM, DOM} ⊨ SysReq
これは,左側が成立すれば,右側を満足するという一般的な読み方でもよいし,左側が右をモデル化していると読むこともできる.
(nil)